Architecture
This page provides conceptual information on Nomad architecture. Learn how regions, servers, and clients interact, and how Nomad clusters replicate data and run workloads.
Nomad is a complex system that has many different pieces. To help both users and developers of Nomad build a mental model of how it works, this page documents the system architecture.
Refer to the glossary for more details on some of the terms discussed here.
Advanced Topic! This page covers technical details of Nomad. You do not need to understand these details to effectively use Nomad. The details are documented here for those who wish to learn about them without having to go spelunking through the source code.
High-Level Overview
Looking at only a single region, at a high level Nomad looks like this:
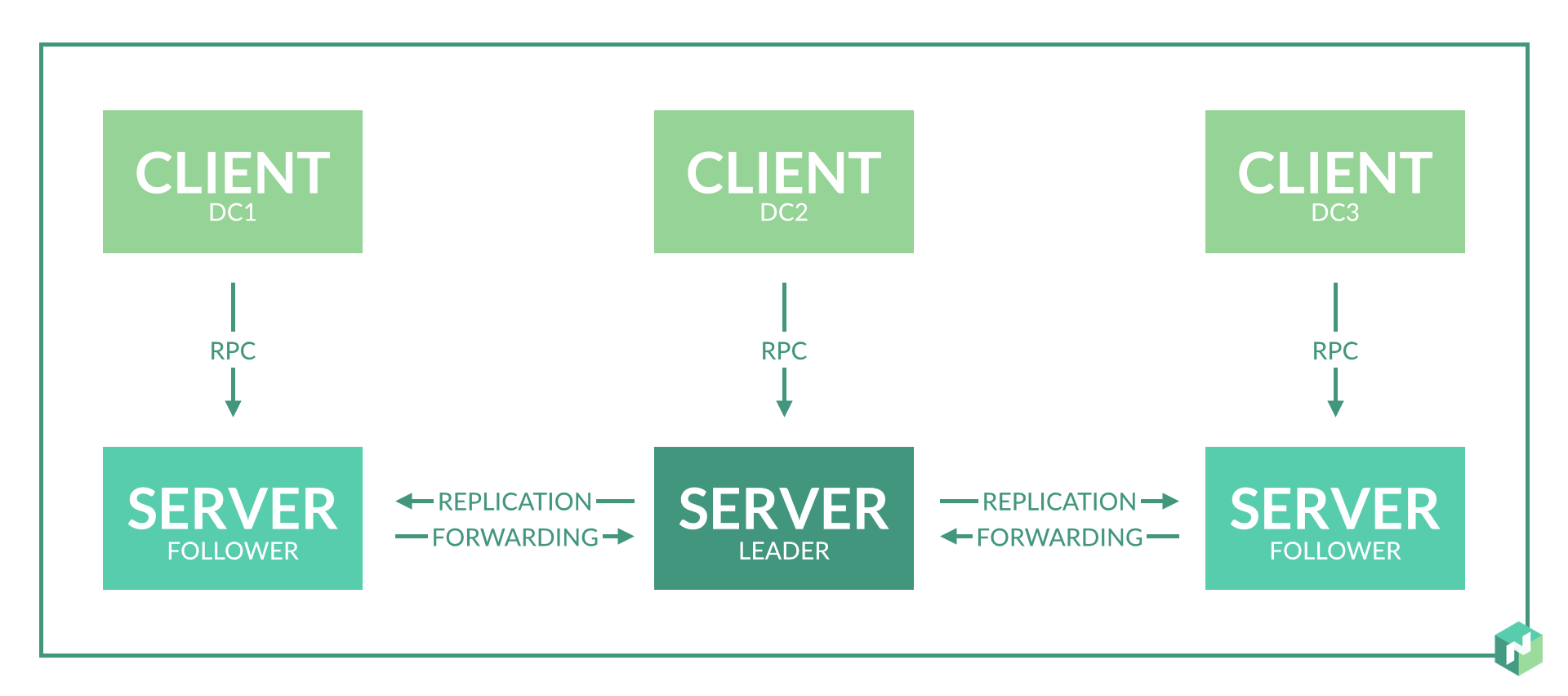
Within each region, we have both clients and servers. Servers are responsible for accepting jobs from users, managing clients, and computing task placements. Each region may have clients from multiple datacenters, allowing a small number of servers to handle very large clusters.
In some cases, for either availability or scalability, you may need to run multiple regions. Nomad supports federating multiple regions together into a single cluster. At a high level, this setup looks like this:

Regions are fully independent from each other, and do not share jobs, clients, or state. They are loosely-coupled using a gossip protocol, which allows users to submit jobs to any region or query the state of any region transparently. Requests are forwarded to the appropriate server to be processed and the results returned. Data is not replicated between regions.
The servers in each region are all part of a single consensus group. This means that they work together to elect a single leader which has extra duties. The leader is responsible for processing all queries and transactions. Nomad is optimistically concurrent, meaning all servers participate in making scheduling decisions in parallel. The leader provides the additional coordination necessary to do this safely and to ensure clients are not oversubscribed.
Each region is expected to have either three or five servers. This strikes a balance between availability in the case of failure and performance, as consensus gets progressively slower as more servers are added. However, there is no limit to the number of clients per region.
Clients are configured to communicate with their regional servers and communicate using remote procedure calls (RPC) to register themselves, send heartbeats for liveness, wait for new allocations, and update the status of allocations. A client registers with the servers to provide the resources available, attributes, and installed drivers. Servers use this information for scheduling decisions and create allocations to assign work to clients.
Users make use of the Nomad CLI or API to submit jobs to the servers. A job represents a desired state and provides the set of tasks that should be run. The servers are responsible for scheduling the tasks, which is done by finding an optimal placement for each task such that resource utilization is maximized while satisfying all constraints specified by the job. Resource utilization is maximized by bin packing, in which the scheduling tries to make use of all the resources of a machine without exhausting any dimension. Job constraints can be used to ensure an application is running in an appropriate environment. Constraints can be technical requirements based on hardware features such as architecture and availability of GPUs, or software features like operating system and kernel version, or they can be business constraints like ensuring PCI compliant workloads run on appropriate servers.
Getting in Depth
This has been a brief high-level overview of the architecture of Nomad. There are more details available for each of the sub-systems. The consensus protocol, gossip protocol, and scheduler design are all documented in more detail.
For other details, either consult the code, open an issue on GitHub, or ask a question in the community forum.